Are you sure you want to delete this task? Once this task is deleted, it cannot be recovered.
You can not select more than 25 topics
Topics must start with a chinese character,a letter or number, can include dashes ('-') and can be up to 35 characters long.
 hwk
d90d50eaad
hwk
d90d50eaad
|
2 years ago | |
|---|---|---|
| __pycache__ | 2 years ago | |
| cache | 2 years ago | |
| config | 2 years ago | |
| db | 2 years ago | |
| images | 2 years ago | |
| models | 2 years ago | |
| nnet | 2 years ago | |
| sample | 2 years ago | |
| test | 2 years ago | |
| utils | 2 years ago | |
| LICENSE | 2 years ago | |
| README.md | 2 years ago | |
| config.py | 2 years ago | |
| detection.py | 2 years ago | |
| environment.txt | 2 years ago | |
| requirements.txt | 2 years ago | |
README.md
MSTR: Multilane shape prediction with transformer
版本
1.0
描述
传入车载摄像头图片,进行single-stage的多车道检测
适用场景
主要应用于车载摄像头(前挡风玻璃视角或车顶视角),沿着车辆前行方向的照片

性能
多车道线检测模型在自建深圳街景数据集的数据集下,Accuracy为0.903,FP为0.095, FN为0.086,FPS为95.9.
使用数据集
训练数据集:Tusimple 和 自建深圳街景数据集
测试数据集:自建深圳街景数据集
环境配置
-
Linux ubuntu 16.04, 参考requirements.txt,Pytorch的版本为1.5
conda env create --name lstr --file environment.txt conda activate lstr pip install -r requirements.txt
调用说明
模型初始化
from detection import Detector
det = Detector()
图片检测推理
res = det.predict(image)
输入说明
| 参数 | 类型 | 是否必填 | 说明 |
|---|---|---|---|
| image | ndarray | 是 | 维度为(H,W,C)的图片,通道类型为BGR |
输出说明
若无检测到的车道,返回dict中lane_num为0, pred为空列表
若检测到车道,返回元素为dict,其中lane_num为预测的车道数量, pred为各个车道的参数
-
结果参数
字段 类型 说明 lane_num int 检测车道的数量 pred dict 各个车道的参数 -
pred参数列表
函数详见Detector().draw_pred_lanes_on_imgindex 说明 0 推理模式下值恒为1 1 车道线出现上边界,[0, 1] 2 车道线出现下边界,[0, 1] 3~6 相机拟合参数,对于所有车道线而言一致 7~8 垂直方向的起始和结束偏移
调用示例
import cv2
from detection import Detector
fn = './images/demo.jpg'
img_np = cv2.imread(fn)
det = Detector()
res = det.predict(img_np)
print(res)
# 预测结果可视化,返回值为ndarray(通道BGR)
img_ans = det.draw_pred_lanes_on_img(img_np, out_path='./images/demo_res.jpg')
返回示例
# return of det.predict()
{'lane_num': 4,
'pred': [
[1.0,0.49616843461990356,0.8387134075164795,-0.026381952688097954,-0.8071742057800293,0.16039453446865082,0.06537707149982452,1.3407330513000488,0.27653542160987854],
[1.0,0.5121796131134033,0.7413002252578735,-0.026381952688097954,-0.8071742057800293,0.16039453446865082,0.06537707149982452,-1.9884920120239258,-1.331274390220642],
[1.0,0.500149667263031,0.9988266825675964,-0.026381952688097954,-0.8071742057800293,0.16039453446865082,0.06537707149982452,0.41860583424568176,-0.15374942123889923],
[1.0,0.5129679441452026,0.986085057258606,-0.026381952688097954,-0.8071742057800293,0.16039453446865082,0.06537707149982452,-0.7568719387054443,-0.7400014400482178]
]
}
预测样本情况
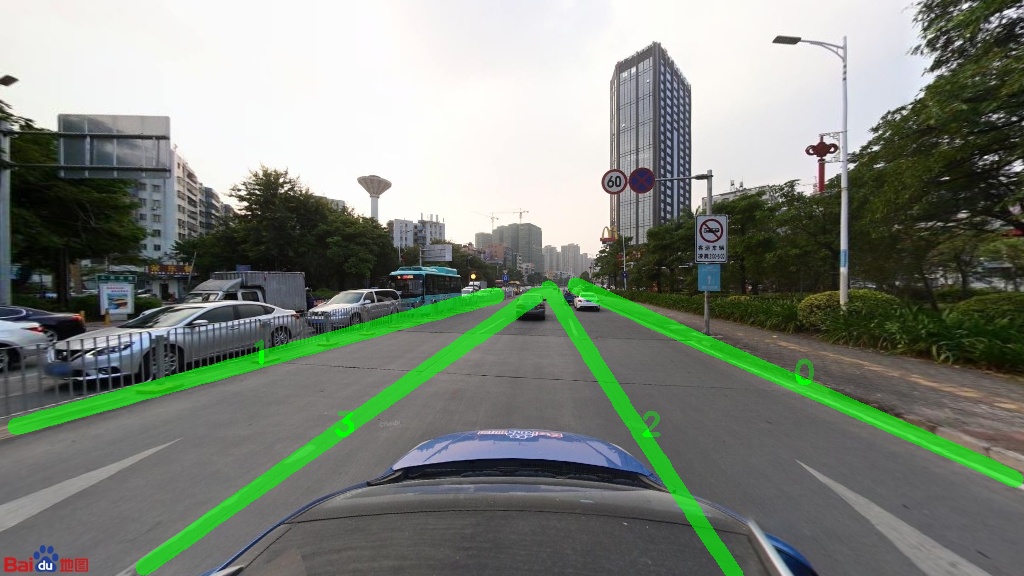
基于transformer的多车道线线形预测,后续将增加识别车道线类型的功能
Python Text